ЫҢШ§ШҜЪҜЫҢШұЫҢ Ш№Щ…ЫҢЩӮ
Ш·ШЁЩӮЩҮ ШЁЩҶШҜЫҢ Щ…Ш§ШұЪ© Ш®ЩҲШҜШұЩҲ ШҜШұ ЫҢШ§ШҜЪҜЫҢШұЫҢ Ш№Щ…ЫҢЩӮ ШЁШ§ ЩҫШ§ЫҢШӘЩҲЩҶ
Ш§ЩҶШӘЩӮШ§Щ„ ЫҢШ§ШҜЪҜЫҢШұЫҢ VGG16 ЩҲ Resnet 50 ШЁШ§ Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ Keras

Ш№Ъ©Ші ШӘЩҲШіШ· Beat Jau ШҜШұ Unsplash
Щ…ЩӮШҜЩ…ЩҮ
ШҜШұ Ш§ЫҢЩҶ Щ…ЩӮШ§Щ„ЩҮ ШҢ Ш·ШЁЩӮЩҮ ШЁЩҶШҜЫҢ Щ…Ш§ШұЪ© Ш®ЩҲШҜШұЩҲ ШұШ§ ШЁШ§ Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ ШӘШөШ§ЩҲЫҢШұ ЩҫЫҢШ§ШҜЩҮ ШіШ§ШІЫҢ Щ…ЫҢ Ъ©ЩҶЫҢЩ… Ш§ШІ Ш®ЩҲШҜШұЩҲЩҮШ§ЫҢ 3 Щ…Ш§ШұЪ©: Щ…ШұШіШҜШі ШҢ ШўШҰЩҲШҜЫҢ ЩҲ Щ„Ш§Щ…ШЁЩҲШұЪҜЫҢЩҶЫҢ.
VGG-16 ЫҢЪ© ШҙШЁЪ©ЩҮ Ш№ШөШЁЫҢ Ъ©Ш§ЩҶЩҲЩ„ЩҲШҙЩҶ Ш№Щ…ЫҢЩӮ 16 Щ„Ш§ЫҢЩҮ Ш§ШіШӘ Ъ©ЩҮ Щ…ЫҢ ШӘЩҲШ§ЩҶШҜ ШӘШөШ§ЩҲЫҢШұ ШұШ§ ШҜШұ 1000 ШҜШіШӘЩҮ Ш§ШҙЫҢШ§ Ш·ШЁЩӮЩҮ ШЁЩҶШҜЫҢ Ъ©ЩҶШҜ.
Ш§ЫҢЩҶ ШҜШ§ШҜЩҮ ЩҮШ§ Щ…Ш¬Щ…ЩҲШ№ЩҮ ШҙШ§Щ…Щ„ ШӘШөШ§ЩҲЫҢШұ Ш®ЩҲШҜШұЩҲ Щ…ЩҲШұШҜ Ш§ШіШӘЩҒШ§ШҜЩҮ ШЁШұШ§ЫҢ Ш·ШЁЩӮЩҮ ШЁЩҶШҜЫҢ Щ…Ш§ШұЪ© Ш§ШіШӘ. ШҜШұ Ш§ЫҢЩҶШ¬Ш§ ШҢ Щ…Ш§ ШҜЩҲ ЩҫЩҲШҙЩҮ ШҜШ§ШұЫҢЩ… ШЁЩҮ ЩҶШ§Щ… train and test ШҢ ЩҮШұ Ъ©ШҜШ§Щ… ШҜШ§ШұШ§ЫҢ ШіЩҮ ЩҫЩҲШҙЩҮ ШЁЩҮ ЩҶШ§Щ… ЩҮШ§ЫҢ Lamborghini ШҢ Audi ЩҲ Mercedes ЩҮШіШӘЩҶШҜ. Щ…ЫҢЩ„ЫҢЩҲЩҶ ЩҮШ§ ЩҶЩӮШ·ЩҮ ШҜШ§ШҜЩҮ ШҜШ§ШұШ§ЫҢ ШЁШұЪҶШіШЁ ШЁШұШ§ЫҢ ШўЩ…ЩҲШІШҙ ЪҶЩҶЫҢЩҶ Щ…ШҜЩ„ЩҮШ§ЫҢ ЩҫЫҢЪҶЫҢШҜЩҮ Ш§ЫҢ ЩҶШҜШ§ШұЫҢШҜ.
Ш§Ъ©ЩҶЩҲЩҶ ШЁЫҢШ§ЫҢЫҢШҜ ЩҮЩ…ЩҮ Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ ЩҮШ§ЫҢ Щ…ЩҲШұШҜ ЩҶЫҢШ§ШІ ШұШ§ ЩҲШ§ШұШҜ Ъ©ЩҶЫҢЩ…
ШҜШұ Ш§ЫҢЩҶШ¬Ш§ ШҢ Щ…Ш§ Ш§ШІ Keras Ш§ШіШӘЩҒШ§ШҜЩҮ Щ…ЫҢ Ъ©ЩҶЫҢЩ… ШІЫҢШұШ§ ШўШІЩ…Ш§ЫҢШҙ ШіШұЫҢШ№ ШЁШ§ ШҙШЁЪ©ЩҮ ЩҮШ§ЫҢ Ш№ШөШЁЫҢ Ш№Щ…ЫҢЩӮ ШұШ§ Ш§Щ…Ъ©Ш§ЩҶ ЩҫШ°ЫҢШұ Щ…ЫҢ Ъ©ЩҶШҜ. ШЁЩҮ Щ…Ш§ Щ…ШҜЩ„ Ш®ЩҲШҜ ШұШ§ ШЁШ§ Ъ©Щ…Ъ© Resnet 50 Щ…ЫҢ ШіШ§ШІЫҢЩ… ШІЫҢШұШ§ Щ…ЫҢ ШӘЩҲШ§ЩҶШҜ ШҙШЁЪ©ЩҮ ЩҮШ§ЫҢ Ш№ШөШЁЫҢ Ш№Щ…ЫҢЩӮ ШұШ§ ШЁШ§ Щ„Ш§ЫҢЩҮ ЩҮШ§ЫҢ Щ…ШӘШ№ШҜШҜ ШўЩ…ЩҲШІШҙ ШҜЩҮШҜ.
Щ…Ш§ ШЁШ§ЫҢШҜ ЩҶЩ…ЩҲЩҶЩҮ ЩҮШ§ЫҢ ШўЩ…ЩҲШІШҙЫҢ Ш¬ШҜЫҢШҜЫҢ ШұШ§ Ш§ШІ ЩҶЩ…ЩҲЩҶЩҮ ЩҮШ§ЫҢ Щ…ЩҲШ¬ЩҲШҜ Ш§ЫҢШ¬Ш§ШҜ Ъ©ЩҶЫҢЩ… ШҢ Ш§ЫҢЩҶ ЩҒШұШ§ЫҢЩҶШҜ ШҜШұ ШӯШ§Щ„ ШӯШ§Ш¶Шұ Ш§ЩҒШІШ§ЫҢШҙ ШӘШөЩҲЫҢШұ Ш§ШіШӘ. Ш§ЫҢЩҶ ШұШ§ Щ…ЫҢ ШӘЩҲШ§ЩҶ ШЁШ§ Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ Image Data Generator Ш§ЩҶШ¬Ш§Щ… ШҜШ§ШҜ.
Щ…Ш¬Щ…ЩҲШ№ЩҮ ШҜШ§ШҜЩҮ Щ…ЩҲШұШҜ Ш§ШіШӘЩҒШ§ШҜЩҮ ШұШ§ Щ…ЫҢ ШӘЩҲШ§ЩҶЫҢШҜ Ш§ШІ Ш§ЫҢЩҶШ¬Ш§ ШЁШ§ШұЪҜЫҢШұЫҢ Ъ©ЩҶЫҢШҜ: Щ…Ш¬Щ…ЩҲШ№ЩҮ Ш№Ъ©Ші ШӘШөШ§ЩҲЫҢШұ ЩҶШ§Щ… ШӘШ¬Ш§ШұЫҢ Ш®ЩҲШҜШұЩҲ | Kaggle
# ЩҲШ§ШұШҜ Ъ©ШұШҜЩҶ Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ ЩҮШ§ЫҢ Щ…ЩҲШұШҜ ЩҶЫҢШ§ШІ
Ш§ШІ tensorflow.keras.layers ЩҲШ§ШұШҜ Ъ©ШұШҜЩҶ ЩҲШұЩҲШҜЫҢ ШҢ Lambda ШҢ Dense ШҢ Flatten
Ш§ШІ tensorflow.keras.models Щ…ШҜЩ„ ЩҲШ§ШұШҜШ§ШӘ
Ш§ШІ tensorflow.keras.applications.resnet50 ЩҲШ§ШұШҜ ResNet50
#ЩҲШ§ШұШҜШ§ШӘ VGG16
Ш§ШІ tensorflow.keras.applications.resnet50
preprocess_input ШұШ§ ЩҲШ§ШұШҜ Ъ©ЩҶЫҢШҜ
Ш§ШІ tensorflow.keras.preprocessing import image
Ш§ШІ ЩҲШ§ШұШҜШ§ШӘ tensorflow.keras.preprocessing.image
ImageDataGenerator ШҢ load_img from tensorflow.keras.models import Sequential
import numpy as np
import matplotlib.pyplot as plt
from glob import glob
ЩҮЩ…ЩҮ ШӘШөШ§ЩҲЫҢШұ ШұШ§ ШЁЩҮ Ш§ЩҶШҜШ§ШІЩҮ [224 ШҢ 224] ШӘШәЫҢЫҢШұ ШҜЩҮЫҢШҜ ЩҲ ЫҢЪ© ЩҒЩҮШұШіШӘ ШЁШ§ ШҜЩҲ ЩҫЩҲШҙЩҮ Ш¬ШҜШ§ЪҜШ§ЩҶЩҮ ШЁШ§ ЩҶШ§Щ… train ЩҲ test Ш§ЫҢШ¬Ш§ШҜ Ъ©ЩҶЫҢШҜ. Ш§ЫҢЩҶ ЩҫЩҲШҙЩҮ ЩҮШ§ ШҙШ§Щ…Щ„ ШӘШөШ§ЩҲЫҢШұ Ш§ШӘЩҲЩ…ШЁЫҢЩ„ ЩҮШ§ЫҢ Щ…ЩҲШұШҜ ЩҶЫҢШ§ШІ ШЁШұШ§ЫҢ Ш·ШЁЩӮЩҮ ШЁЩҶШҜЫҢ ЩҮШіШӘЩҶШҜ. = 'Щ…Ш¬Щ…ЩҲШ№ЩҮ ШҜШ§ШҜЩҮ ЩҮШ§/ЩӮШ·Ш§Шұ'
valid_path = 'Щ…Ш¬Щ…ЩҲШ№ЩҮ ШҜШ§ШҜЩҮ ЩҮШ§/ШўШІЩ…Ш§ЫҢШҙ'
Щ…Ш§ Ш§ШІ ЩҲШІЩҶ ЩҮШ§ЫҢ imagenet Ш§ШіШӘЩҒШ§ШҜЩҮ Щ…ЫҢ Ъ©ЩҶЫҢЩ… ШІЫҢШұШ§ ЩҶЫҢШ§ШІЫҢ ШЁЩҮ ШўЩ…ЩҲШІШҙ ШҙШЁЪ©ЩҮ Ш№ШөШЁЫҢ Ш§ШІ Ш§ШЁШӘШҜШ§ ЩҶЫҢШіШӘ.
# Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ ЩҲШІЩҶ imagenet
resnet = ResNet50 (input_shape = IMAGE_SIZE + [3] ШҢ ЩҲШІЩҶ = 'imagenet' ШҢ
include_top = False) 
Ш№Ъ©Ші ЩҶЩҲЫҢШіЩҶШҜЩҮ
ШҜШұ Ш§ЫҢЩҶШ¬Ш§ Щ…Ш§ Ш§ШІ Resnet Ш§ШіШӘЩҒШ§ШҜЩҮ Щ…ЫҢ Ъ©ЩҶЫҢЩ… ШІЫҢШұШ§ ЩҫЫҢШҙШұЩҒШӘ Ш§ШіШ§ШіЫҢ ШҜШұ ResNet Ш§ЫҢЩҶ ШЁЩҲШҜ Ъ©ЩҮ ШЁЩҮ Щ…Ш§ Ш§Ш¬Ш§ШІЩҮ ШҜШ§ШҜ ШҙШЁЪ©ЩҮ ЩҮШ§ЫҢ Ш№ШөШЁЫҢ ШЁШіЫҢШ§Шұ Ш№Щ…ЫҢЩӮ ШұШ§ ШЁШ§ ШЁЫҢШҙ Ш§ШІ 150 Щ„Ш§ЫҢЩҮ ШЁШ§ Щ…ЩҲЩҒЩӮЫҢШӘ ШўЩ…ЩҲШІШҙ ШҜЩҮЫҢЩ….
# ЩҲШІЩҶЩҮ ЩҮШ§ЫҢ Щ…ЩҲШ¬ЩҲШҜ ШұШ§ ШўЩ…ЩҲШІШҙ ЩҶШҜЩҮЫҢШҜ
ШЁШұШ§ЫҢ Щ„Ш§ЫҢЩҮ ШҜШұ resnet.layers:
layer.trainable = False # Ш§ЫҢЩҶ ШЁЩҮ ШҜШұЫҢШ§ЩҒШӘ ШӘШ№ШҜШ§ШҜ Ъ©Щ„Ш§ШіЩҮШ§ЫҢ Ш®ШұЩҲШ¬ЫҢ Ъ©Щ…Ъ© Щ…ЫҢ Ъ©ЩҶШҜ
ЩҫЩҲШҙЩҮ ЩҮШ§ = glob ('Щ…Ш¬Щ…ЩҲШ№ЩҮ ШҜШ§ШҜЩҮ ЩҮШ§/ЩӮШ·Ш§Шұ/*') # Щ„Ш§ЫҢЩҮ ЩҮШ§ЫҢ Щ…Ш§
x = Flatten () (resnet.output)
prediction = Щ…ШӘШұШ§Ъ©Щ… (len (ЩҫЩҲШҙЩҮ ЩҮШ§) ШҢ ЩҒШ№Ш§Щ„ ШіШ§ШІЫҢ = 'softmax') (x)
# Ш§ЫҢШ¬Ш§ШҜ Щ…ШҜЩ„ ШҙЫҢ
model = model (ЩҲШұЩҲШҜЫҢ = resnet.input ШҢ Ш®ШұЩҲШ¬ЫҢ = ЩҫЫҢШҙ ШЁЫҢЩҶЫҢ)
model.summary ()
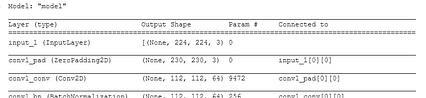
Ш®Щ„Ш§ШөЩҮ Щ…ШҜЩ„ Ш№Ъ©Ші ЩҶЩҲЫҢШіЩҶШҜЩҮ
ШҜШұ Ш§ЫҢЩҶШ¬Ш§ Ш§ШІ categorical_crossentropy Ш§ШіШӘЩҒШ§ШҜЩҮ Щ…ЫҢ Ъ©ЩҶЫҢЩ… ЫҢЪ© ШӘШ§ШЁШ№ Ш¶ШұШұ Ш§ШіШӘ Ъ©ЩҮ ШҜШұ Ъ©Ш§ШұЩҮШ§ЫҢ Ш·ШЁЩӮЩҮ ШЁЩҶШҜЫҢ ЪҶЩҶШҜ Ш·ШЁЩӮЩҮ Ш§ЫҢ Ш§ШіШӘЩҒШ§ШҜЩҮ Щ…ЫҢ ШҙЩҲШҜ.
# Щ…ШҜЩ„ ШұШ§
Ъ©Ш§Щ…ЩҫШ§ЫҢЩ„ Ъ©ЩҶЫҢШҜ. Ъ©Ш§Щ…ЩҫШ§ЫҢЩ„ (loss = 'categorical_crossentropy'ШҢ optimizer = 'adam'ШҢ
metrics = ['ШҜЩӮШӘ']) # Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ Щ…ЩҲЩ„ШҜ ШҜШ§ШҜЩҮ ЩҮШ§ЫҢ ШӘШөЩҲЫҢШұЫҢ
Ш§ШІ tensorflow.keras.preprocessing.image import ImageDataGenerator
train_datagen = ImageDataGenerator (ШЁШ§ШІЩҫШұШҜШ§Ш®ШӘ = 1./255 ШҢ Щ…ШӯШҜЩҲШҜЩҮ ШЁШұШҙЫҢ =
0.2 ШҢ zoom_range = 0.2 ШҢ horizontal_flip = True) test_datagen = ImageDataGenerator (ШұШіЩҫШұШі = 1./255)
training_set= train_datagen.flow_from_directory ("Щ…Ш¬Щ…ЩҲШ№ЩҮ ШҜШ§ШҜЩҮ ЩҮШ§/ЩӮШ·Ш§Шұ" ШҢ
target_size = (224 ШҢ 224) ШҢ
batch_size = 32 ШҢ
class_mode = 'Ш·ШЁЩӮЩҮ ШЁЩҶШҜЫҢ') #output:
64 ШӘШөЩҲЫҢШұ Щ…ШӘШ№Щ„ЩӮ ШЁЩҮ 3 Ъ©Щ„Ш§Ші ЩҫЫҢШҜШ§ ШҙШҜ.
test_set = test_datagen.flow_from_directory ("Щ…Ш¬Щ…ЩҲШ№ЩҮ ШҜШ§ШҜЩҮ ЩҮШ§/ШӘШіШӘ" ШҢ
target_size = (224 ШҢ 224) ШҢ
batch_size = 32 ШҢ
class_mode = вҖҳcategoricalвҖҷ) #output:
58 ШӘШөЩҲЫҢШұ Щ…ШӘШ№Щ„ЩӮ ШЁЩҮ 3 Ъ©Щ„Ш§Ші ЫҢШ§ЩҒШӘ ШҙШҜ.
ШҜЩҲШұЩҮ ЩҮШ§ = 50 ШҢ steps_per_epoch = Щ„ЩҶ (Щ…Ш¬Щ…ЩҲШ№ЩҮ_ШўЩ…ЩҲШІШҙ) ШҢ
validation_steps = len (test_set) 
ШўЩ…ЩҲШІШҙ Щ…ШҜЩ„. Ш№Ъ©ШіЫҢ Ш§ШІ ЩҶЩҲЫҢШіЩҶШҜЩҮ
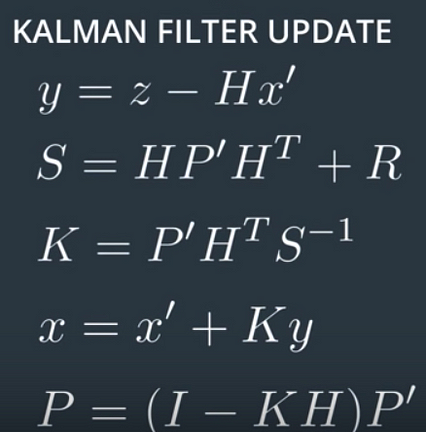
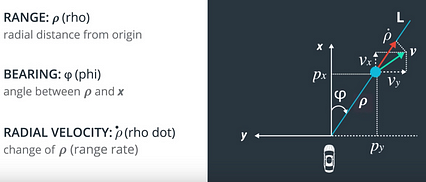
ЩҫЫҢШҙ ШЁЫҢЩҶЫҢ ЩӮЫҢЩ…ШӘ ШЁЫҢШӘ Ъ©ЩҲЫҢЩҶ ШЁШ§ RNN ЩҲ LSTM ШҜШұ ЩҫШ§ЫҢШӘЩҲЩҶ
ЩҫЫҢШҙ ШЁЫҢЩҶЫҢ ЩӮЫҢЩ…ШӘ ШЁЫҢШӘ Ъ©ЩҲЫҢЩҶ ШЁШ§ Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ Deep Learningpub.towardsai.net Ш§Ъ©ЩҶЩҲЩҶ ШҢ ЩҶЩӮШҙЩҮ Ш¶ШұШұ
# Ш·ШұШӯ Ш¶ШұШұ
plt.plot (r.history [' Ш¶ШұШұ '] ШҢ label =' Ш§ШІ ШҜШіШӘ ШҜШ§ШҜЩҶ ЩӮШ·Ш§Шұ ')
plt.plot (r.history ['val_loss']ШҢ label = 'val loss')
plt.legend ()
plt.show ()
plt.savefig ('LossVal_loss') # ШӘШұШіЫҢЩ… ШҜЩӮШӘ
plt.plot (r.history ['ШҜЩӮШӘ'] ШҢ label = 'acc accrain')
plt.plot (r.history ['val_accuracy']ШҢ label = 'val acc')
plt.legend ()
plt.show ()
plt.savefig ('AccVal_acc') 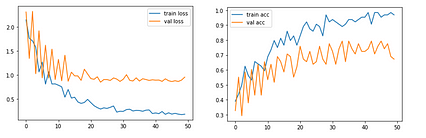
ЩҶЩ…ЩҲШҜШ§Шұ Ш¶ШұШұ ЩҲ ШҜЩӮШӘ. Ш№Ъ©ШіЫҢ Ш§ШІ ЩҶЩҲЫҢШіЩҶШҜЩҮ
Ш§ШІ ЩҶЩ…ЩҲШҜШ§Шұ ЩҒЩҲЩӮ ШҢ Щ…ЫҢ ШӘЩҲШ§ЩҶЫҢЩ… Ш§ШіШӘЩҶШЁШ§Ш· Ъ©ЩҶЫҢЩ… Ъ©ЩҮ Ш¶ШұШұ Ш§Ш№ШӘШЁШ§Шұ ШЁЫҢШҙШӘШұ Ш§ШІ ШӘЩ„ЩҒШ§ШӘ ЩӮШ·Ш§Шұ ЩҲ ШҜЩӮШӘ ЩӮШ·Ш§Шұ ШЁЫҢШҙШӘШұ Ш§ШІ Ш§Ш№ШӘШЁШ§Шұ Ш§Ш№ШӘШЁШ§Шұ Ш§ШіШӘ.
Ш§Ъ©ЩҶЩҲЩҶ Щ…Ш§ ШЁШ§ЫҢШҜ Щ…ШҜЩ„ Ш®ЩҲШҜ ШұШ§ Ш°Ш®ЫҢШұЩҮ Ъ©ЩҶЫҢЩ… ШЁШ§ ЩҒШұЩ…ШӘ ЩҒШ§ЫҢЩ„ h5 ШЁШұШ§ЫҢ ШўШІЩ…Ш§ЫҢШҙ ШЁЫҢШҙШӘШұ Щ…ШҜЩ„.
model.save ('model_resnet50.h5')
ЩҫШі Ш§ШІ ШЁШ§ШұЪҜШ°Ш§ШұЫҢ Щ…ШҜЩ„ ШҢ ШЁЫҢШ§ЫҢЫҢШҜ ЩҫЫҢШҙ ШЁЫҢЩҶЫҢ ЩҮШ§ЫҢЫҢ ШұШ§ ШҜШұ Щ…Ш¬Щ…ЩҲШ№ЩҮ ШўШІЩ…Ш§ЫҢШҙ Ш§ЩҶШ¬Ш§Щ… ШҜЩҮЫҢЩ….
y_pred = model.predict (test_set)
y_pred
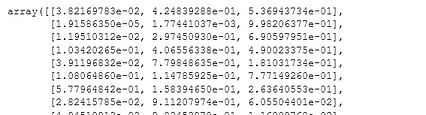
Щ…ЩӮШ§ШҜЫҢШұ ЩҫЫҢШҙ ШЁЫҢЩҶЫҢ. Ш№Ъ©ШіЫҢ Ш§ШІ ЩҶЩҲЫҢШіЩҶШҜЩҮ
Np.argmax () ШҜШұ Ш§ЫҢЩҶШ¬Ш§ ШЁШұШ§ЫҢ ШЁШҜШіШӘ ШўЩҲШұШҜЩҶ ШҙШ§Ш®ШөЩҮШ§ЫҢ ШӯШҜШ§Ъ©Ш«Шұ Ш№ЩҶШөШұ Ш§ШІ ЫҢЪ© ШўШұШ§ЫҢЩҮ Ш§ШіШӘЩҒШ§ШҜЩҮ Щ…ЫҢ ШҙЩҲШҜ.
y_pred = np.argmax (y_predШҢ axis = 1)
y_pred

Ш№Ъ©Ші ЩҶЩҲЫҢШіЩҶШҜЩҮ
Ш§ШІ tensorflow.keras .models ЩҲШ§ШұШҜ Ъ©ЩҶЫҢШҜ load_model
#ШЁШ§ШұЪҜШ°Ш§ШұЫҢ ЩҒШ§ЫҢЩ„ h5 ШҜШұ Щ…ШҜЩ„
model = load_model ('model_resnet50.h5') Ш§Ъ©ЩҶЩҲЩҶ Щ…Ш§ Щ…ШҜЩ„ ШұШ§ ШЁШұ ШұЩҲЫҢ ЩҮШұ ШӘШөЩҲЫҢШұ ШӘШөШ§ШҜЩҒЫҢ Ш§ШІ ШҜШ§ШҜЩҮ ЩҮШ§ЫҢ ШўШІЩ…Ш§ЫҢШҙ ШўШІЩ…Ш§ЫҢШҙ Щ…ЫҢ Ъ©ЩҶЫҢЩ….
img = image.load_img ('Щ…Ш¬Щ…ЩҲШ№ЩҮ ШҜШ§ШҜЩҮ ЩҮШ§/ШӘШіШӘ/Щ„Ш§Щ…ШЁЩҲШұЪҜЫҢЩҶЫҢ /11.jpg'ШҢtarget_size=(224ШҢ224)) x = image.img_to_array (img)
x
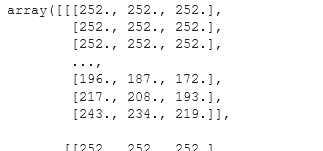
Ш№Ъ©Ші ЩҶЩҲЫҢШіЩҶШҜЩҮ
#ШҙЪ©Щ„ Ш§ШІ ШӘШөЩҲЫҢШұ
x.shape
#output:
(224 ШҢ 224 ШҢ 3)
#Ш№Ш§ШҜЫҢ ШіШ§ШІЫҢ Щ…ЩӮШ§ШҜЫҢШұ ЩҫЫҢЪ©ШіЩ„ ЩҮШ§ЫҢ ШӘШөЩҲЫҢШұ
x = x/255
#Ш§ШЁШ№Ш§ШҜ ШӘШөЩҲЫҢШұ ШұШ§ ЪҜШіШӘШұШҙ ШҜЩҮЫҢШҜ
x = np.expand_dims (xШҢ axis = 0)
img_data = preprocess_input (x)
img_data.shape
#output:
(1 ШҢ 224 ШҢ 224 ШҢ 3)
ШҜШұ ШӯШ§Щ„ ШӯШ§Ш¶Шұ ШҢ ЩҫЫҢШҙ ШЁЫҢЩҶЫҢ ШҜШұ Щ…ЩҲШұШҜ img_data
model.predict (img_data)
#output:
ШўШұШ§ЫҢЩҮ ([[0.01513638 ШҢ 0.01566849 ШҢ 0.9691952]] ШҢ dtype = float32)
a = np.argmax (model.predict (img_data) ШҢ Щ…ШӯЩҲШұ = 1)
a == 1
#output:
ШўШұШ§ЫҢЩҮ ([ШҜШұШіШӘ])
ШЁЩҶШ§ШЁШұШ§ЫҢЩҶ Щ…Ш§ Ш·ШЁЩӮЩҮ ШЁЩҶШҜЫҢ ШӘШөЩҲЫҢШұ ШұШ§ ШЁШұ ШұЩҲЫҢ Щ…Ш¬Щ…ЩҲШ№ЩҮ ШҜШ§ШҜЩҮ Ш§ЩҶШ¬Ш§Щ… Щ…ЫҢ ШҜЩҮЫҢЩ….
ЩҶШӘЫҢШ¬ЩҮ ЪҜЫҢШұЫҢ:
Ш§ЫҢЩҶ Щ…ЩӮШ§Щ„ЩҮ ЫҢЪ© ШұЩҲШҙ Ш№Щ…Щ„ЫҢ ШЁШұШ§ЫҢ Ш·ШЁЩӮЩҮ ШЁЩҶШҜЫҢ Ш®ЩҲШҜШұЩҲЩҮШ§ Ш§ШұШ§ШҰЩҮ Щ…ЫҢ ШҜЩҮШҜ ШӘШөШ§ЩҲЫҢШұ Щ…Ш§ШұЪ© Ш§ШІ Ш§ЫҢЩҶ Щ…ШҜЩ„ Щ…ЫҢ ШӘЩҲШ§ЩҶ ШЁШұШ§ЫҢ ЩҫЫҢШҙ ШЁЫҢЩҶЫҢ Щ…Ш§ШұЪ© Ш®ЩҲШҜШұЩҲ ШЁШ§ Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ ЩҒШ§ЫҢЩ„ "h5" Ш§ШіШӘЩҒШ§ШҜЩҮ Ъ©ШұШҜ.
Ш§Щ…ЫҢШҜЩҲШ§ШұЩ… Щ…ЩӮШ§Щ„ЩҮ ШұШ§ ШҜЩҲШіШӘ ШҜШ§ШҙШӘЩҮ ШЁШ§ШҙЫҢШҜ. ШҜШұ LinkedIn ЩҲ ШӘЩҲЫҢЫҢШӘШұ Ш®ЩҲШҜ ШЁШ§ Щ…ЩҶ ШӘЩ…Ш§Ші ШЁЪҜЫҢШұЫҢШҜ.
Щ…ЩӮШ§Щ„Ш§ШӘ ШӘЩҲШөЫҢЩҮ ШҙШҜЩҮ
1. NLP - ШөЩҒШұ ШЁЩҮ ЩӮЩҮШұЩ…Ш§ЩҶ ШЁШ§ ЩҫШ§ЫҢШӘЩҲЩҶ
2. ШіШ§Ш®ШӘШ§ШұЩҮШ§ЫҢ ШҜШ§ШҜЩҮ ЩҫШ§ЫҢШӘЩҲЩҶ Ш§ЩҶЩҲШ§Ш№ ШҜШ§ШҜЩҮ ЩҮШ§ ЩҲ Ш§ШҙЫҢШ§ШЎ
3. Ш§ШіШӘШ«ЩҶШ§ШЎ Щ…ЩҒШ§ЩҮЫҢЩ… ШҜШіШӘЪ©Ш§ШұЫҢ ШҜШұ ЩҫШ§ЫҢШӘЩҲЩҶ
4. ЪҶШұШ§ LSTM ШҜШұ ЫҢШ§ШҜЪҜЫҢШұЫҢ Ш№Щ…ЫҢЩӮ Щ…ЩҒЫҢШҜШӘШұ Ш§ШІ RNN Ш§ШіШӘШҹ
5. ШҙШЁЪ©ЩҮ ЩҮШ§ЫҢ Ш№ШөШЁЫҢ: ШёЩҮЩҲШұ ШҙШЁЪ©ЩҮ ЩҮШ§ЫҢ Ш№ШөШЁЫҢ Щ…Ъ©ШұШұ
6. ШұЪҜШұШіЫҢЩҲЩҶ Ш®Ш·ЫҢ ШЁЩҮ Ш·ЩҲШұ Ъ©Ш§Щ…Щ„ ШЁШ§ ЩҫШ§ЫҢШӘЩҲЩҶ ШӘЩҲШ¶ЫҢШӯ ШҜШ§ШҜЩҮ ШҙШҜЩҮ Ш§ШіШӘ
7. ШұЪҜШұШіЫҢЩҲЩҶ Щ„Ш¬ШіШӘЫҢЪ© ШЁЩҮ Ш·ЩҲШұ Ъ©Ш§Щ…Щ„ ШЁШ§ ЩҫШ§ЫҢШӘЩҲЩҶ ШӘЩҲШ¶ЫҢШӯ ШҜШ§ШҜЩҮ ШҙШҜЩҮ Ш§ШіШӘ
8. ШӘЩҒШ§ЩҲШӘ ШЁЫҢЩҶ concat () ШҢ Ш§ШҜШәШ§Щ… () ЩҲ ЩҫЫҢЩҲШіШӘЩҶ () ШЁЩҮ ЩҫШ§ЫҢШӘЩҲЩҶ
9. ЩҶШІШ§Ш№ ШҜШ§ШҜЩҮ ЩҮШ§ ШЁШ§ ЩҫШ§ЫҢШӘЩҲЩҶ - ЩӮШіЩ…ШӘ 1
10. Щ…Ш§ШӘШұЫҢШі ЪҜЫҢШ¬ЫҢ ШҜШұ ЫҢШ§ШҜЪҜЫҢШұЫҢ Щ…Ш§ШҙЫҢЩҶ
ШӘЩ„ЩҮ Ъ©Ш§ШЁЫҢЩҶ
[ ШЁШ§ШІШҜЫҢШҜ : 20 ] [ Ш§Щ…ШӘЫҢШ§ШІ : 3 ] [ ЩҶШёШұ ШҙЩ…Ш§ :
]




 Щ…ШұШіШҜШі 1996 ШЁЩҶШІ Ъ©Щ„Ш§Ші E
Щ…ШұШіШҜШі 1996 ШЁЩҶШІ Ъ©Щ„Ш§Ші E  2002 ШіШұЫҢ 7 BMW
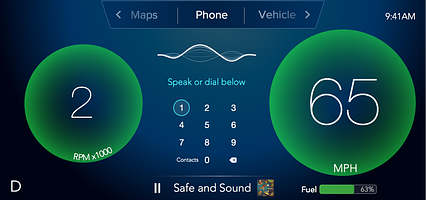
2002 ШіШұЫҢ 7 BMW  Ъ©Ш§ШҜЫҢЩ„Ш§Ъ© CUE
Ъ©Ш§ШҜЫҢЩ„Ш§Ъ© CUE  ЩӮШұШ§Шұ ШҜШ§ШҜЩҶ ШөЩҒШӯЩҮ ЩҶЩ…Ш§ЫҢШҙ ШҜШұ Щ…ШӯШҜЩҲШҜЩҮ SUV ЩҮШ§ЫҢ ЩҒШ№Щ„ЫҢ
ЩӮШұШ§Шұ ШҜШ§ШҜЩҶ ШөЩҒШӯЩҮ ЩҶЩ…Ш§ЫҢШҙ ШҜШұ Щ…ШӯШҜЩҲШҜЩҮ SUV ЩҮШ§ЫҢ ЩҒШ№Щ„ЫҢ  ЩҒШұШ§ШұЫҢ Ъ©Ш§Щ„ЫҢЩҒШұЩҶЫҢШ§ < /img>
ЩҒШұШ§ШұЫҢ Ъ©Ш§Щ„ЫҢЩҒШұЩҶЫҢШ§ < /img>  ШҙЩҮШұ ЩҲ Ъ©ШҙЩҲШұ Ъ©ШұШ§ЫҢШіЩ„Шұ
ШҙЩҮШұ ЩҲ Ъ©ШҙЩҲШұ Ъ©ШұШ§ЫҢШіЩ„Шұ  Apple CarPlay ШЁШ§ ШҜЩҲ ШҜЪ©Щ…ЩҮ Ш§ШөЩ„ЫҢ
Apple CarPlay ШЁШ§ ШҜЩҲ ШҜЪ©Щ…ЩҮ Ш§ШөЩ„ЫҢ  Infiniti Q50 ШЁШ§ ШіЩҮ ЩҶЩ…Ш§ЫҢШҙЪҜШұ Щ…Ш®ШӘЩ„ЩҒ
Infiniti Q50 ШЁШ§ ШіЩҮ ЩҶЩ…Ш§ЫҢШҙЪҜШұ Щ…Ш®ШӘЩ„ЩҒ  2015 Audi TT Vent Controls
2015 Audi TT Vent Controls  ЩҶЩ…Ш§ЫҢШҙ Ш§ШЁШІШ§Шұ Ъ©ЩҶЩҲЩҶЫҢ
ЩҶЩ…Ш§ЫҢШҙ Ш§ШЁШІШ§Шұ Ъ©ЩҶЩҲЩҶЫҢ  = "https://cdn-images-1.medium.com/max/426/1*ei9MQdYIAh2fqc-lhHCCZw.png">
= "https://cdn-images-1.medium.com/max/426/1*ei9MQdYIAh2fqc-lhHCCZw.png"> 







 Ш№Ъ©Ші Devon Divine ШҜШұ Unsplash
Ш№Ъ©Ші Devon Divine ШҜШұ Unsplash 



 < p> Щ…ЩҶ Ш§ШІ Phantom 4 Pro ШЁШұШ§ЫҢ Ш№Ъ©Ш§ШіЫҢ Ш§ШІ ЫҢШ®ЪҶШ§Щ„ ЩҮШ§ЫҢ Ш·ШЁЫҢШ№ЫҢ Ш§ШІ ШҜЩҲШұ Ш§ШіШӘЩҒШ§ШҜЩҮ Ъ©ШұШҜЩ…. ШЁШұШ§ЫҢ Ш№Ъ©Ші ЩҮШ§ЫҢ ЩҶШІШҜЫҢЪ©ШӘШұ ШҢ Mavic Pro ШұШ§ Ш§ЩҶШӘШ®Ш§ШЁ Щ…ЫҢ Ъ©ЩҶЩ… ШҢ ШІЫҢШұШ§ ШӘШ№Ш§ШҜЩ„ Ъ©Ш§Щ…Щ„ Ш§ЩҶШҜШ§ШІЩҮ ШҢ ЩҲШІЩҶ ШҢ ШІЩ…Ш§ЩҶ ЩҫШұЩҲШ§ШІ ЩҲ Ъ©ЫҢЩҒЫҢШӘ ШӘШөЩҲЫҢШұ ШұШ§ Ш§ЫҢШ¬Ш§ШҜ Щ…ЫҢ Ъ©ЩҶШҜ.
< p> Щ…ЩҶ Ш§ШІ Phantom 4 Pro ШЁШұШ§ЫҢ Ш№Ъ©Ш§ШіЫҢ Ш§ШІ ЫҢШ®ЪҶШ§Щ„ ЩҮШ§ЫҢ Ш·ШЁЫҢШ№ЫҢ Ш§ШІ ШҜЩҲШұ Ш§ШіШӘЩҒШ§ШҜЩҮ Ъ©ШұШҜЩ…. ШЁШұШ§ЫҢ Ш№Ъ©Ші ЩҮШ§ЫҢ ЩҶШІШҜЫҢЪ©ШӘШұ ШҢ Mavic Pro ШұШ§ Ш§ЩҶШӘШ®Ш§ШЁ Щ…ЫҢ Ъ©ЩҶЩ… ШҢ ШІЫҢШұШ§ ШӘШ№Ш§ШҜЩ„ Ъ©Ш§Щ…Щ„ Ш§ЩҶШҜШ§ШІЩҮ ШҢ ЩҲШІЩҶ ШҢ ШІЩ…Ш§ЩҶ ЩҫШұЩҲШ§ШІ ЩҲ Ъ©ЫҢЩҒЫҢШӘ ШӘШөЩҲЫҢШұ ШұШ§ Ш§ЫҢШ¬Ш§ШҜ Щ…ЫҢ Ъ©ЩҶШҜ. 











 ШӘШөЩҲЫҢШұ: ЩҶЩҲЫҢШіЩҶШҜЩҮ
ШӘШөЩҲЫҢШұ: ЩҶЩҲЫҢШіЩҶШҜЩҮ 



 Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity
Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity 




 Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity < /img>
Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity < /img> 
 Ш§ШІ Udacity ШіШ®ЩҶШұШ§ЩҶЫҢ
Ш§ШІ Udacity ШіШ®ЩҶШұШ§ЩҶЫҢ  Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity ure
Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity ure  Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity
Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity 
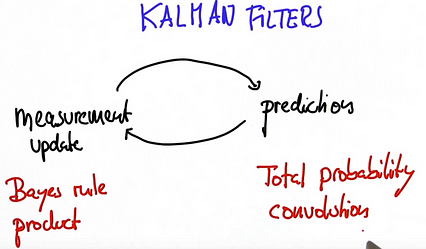
 Щ…Ш№Щ…Ш§ШұЫҢ ШіШ·Шӯ ШЁШ§Щ„Ш§ Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity
Щ…Ш№Щ…Ш§ШұЫҢ ШіШ·Шӯ ШЁШ§Щ„Ш§ Ш§ШІ ШіШ®ЩҶШұШ§ЩҶЫҢ Udacity  ШҙШұЪ©Ш§ЫҢ ШЁШұЩҶШ§Щ…ЩҮ ШҙЪҜЩҒШӘ Ш§ЩҶЪҜЫҢШІ Щ…Ш§ ЩҮШіШӘЩҶШҜ Щ…ШұШіШҜШі ШЁЩҶШІ ШҢ Ш§ШӘЩҲ ШҢ Ш§ЩҶЩҲЫҢШҜЫҢШ§ ЩҲ ШҜЫҢШҜЫҢ ЪҶЩҲЪ©ШіЫҢЩҶЪҜ!
ШҙШұЪ©Ш§ЫҢ ШЁШұЩҶШ§Щ…ЩҮ ШҙЪҜЩҒШӘ Ш§ЩҶЪҜЫҢШІ Щ…Ш§ ЩҮШіШӘЩҶШҜ Щ…ШұШіШҜШі ШЁЩҶШІ ШҢ Ш§ШӘЩҲ ШҢ Ш§ЩҶЩҲЫҢШҜЫҢШ§ ЩҲ ШҜЫҢШҜЫҢ ЪҶЩҲЪ©ШіЫҢЩҶЪҜ!  Ъ©ШҜ ШҙЩ…Ш§ ШЁШұ ШұЩҲЫҢ Ш§ЫҢЩҶ Lincoln MKZ 2016 Щ…Ш¬ЩҮШІ ШЁЩҮ LIDAR ШҢ RADAR ШҢ ШҜЩҲШұШЁЫҢЩҶ ЩҲ ШҜЩҲШұШЁЫҢЩҶ Ш§Ш¬ШұШ§ Щ…ЫҢ ШҙЩҲШҜ ШЁЫҢШҙШӘШұ
Ъ©ШҜ ШҙЩ…Ш§ ШЁШұ ШұЩҲЫҢ Ш§ЫҢЩҶ Lincoln MKZ 2016 Щ…Ш¬ЩҮШІ ШЁЩҮ LIDAR ШҢ RADAR ШҢ ШҜЩҲШұШЁЫҢЩҶ ЩҲ ШҜЩҲШұШЁЫҢЩҶ Ш§Ш¬ШұШ§ Щ…ЫҢ ШҙЩҲШҜ ШЁЫҢШҙШӘШұ 
 Ш§ЩҲШӘЩҲ ШЁЩҮ ШӘШ§ШІЪҜЫҢ ШӘЩҲШіШ· Uber ШЁШ§ Щ…ШЁЩ„Шә 700 Щ…ЫҢЩ„ЫҢЩҲЩҶ ЩҫЩҲЩҶШҜ Ш®ШұЫҢШҜШ§ШұЫҢ ШҙШҜЩҮ Ш§ШіШӘ >
Ш§ЩҲШӘЩҲ ШЁЩҮ ШӘШ§ШІЪҜЫҢ ШӘЩҲШіШ· Uber ШЁШ§ Щ…ШЁЩ„Шә 700 Щ…ЫҢЩ„ЫҢЩҲЩҶ ЩҫЩҲЩҶШҜ Ш®ШұЫҢШҜШ§ШұЫҢ ШҙШҜЩҮ Ш§ШіШӘ > 
 ЩҒЩӮШ· ШЁШұШ®ЫҢ Ш§ШІ ШҜЩҮ ЩҮШ§ ЩҮШІШ§Шұ ШҜШ§ЩҶШҙ ШўЩ…ЩҲШІ Ш№Щ„Ш§ЩӮЩ…ЩҶШҜ ШЁЩҮ ШЁШұЩҶШ§Щ…ЩҮ ЩҶШ§ЩҶЩҲ ШҜШұШ¬ЩҮ Ш§ШӘЩҲЩ…ШЁЫҢЩ„ Ш®ЩҲШҜШұШ§ЩҶ!
ЩҒЩӮШ· ШЁШұШ®ЫҢ Ш§ШІ ШҜЩҮ ЩҮШ§ ЩҮШІШ§Шұ ШҜШ§ЩҶШҙ ШўЩ…ЩҲШІ Ш№Щ„Ш§ЩӮЩ…ЩҶШҜ ШЁЩҮ ШЁШұЩҶШ§Щ…ЩҮ ЩҶШ§ЩҶЩҲ ШҜШұШ¬ЩҮ Ш§ШӘЩҲЩ…ШЁЫҢЩ„ Ш®ЩҲШҜШұШ§ЩҶ!  Ш№Ъ©Ші: sv1ambo Ш§ШІ Ш·ШұЫҢЩӮ Flickr ШҢ CC by-SA-2.0
Ш№Ъ©Ші: sv1ambo Ш§ШІ Ш·ШұЫҢЩӮ Flickr ШҢ CC by-SA-2.0